Hilti AG
- Coordinating a cross-company R&D project on object segmentation and tracking; supervising a Master thesis student.
- Co-organizing the Hilti x Trimble SLAM Challenge 2026, an academic competition delivered in collaboration with Trimble Inc. and University of Oxford.
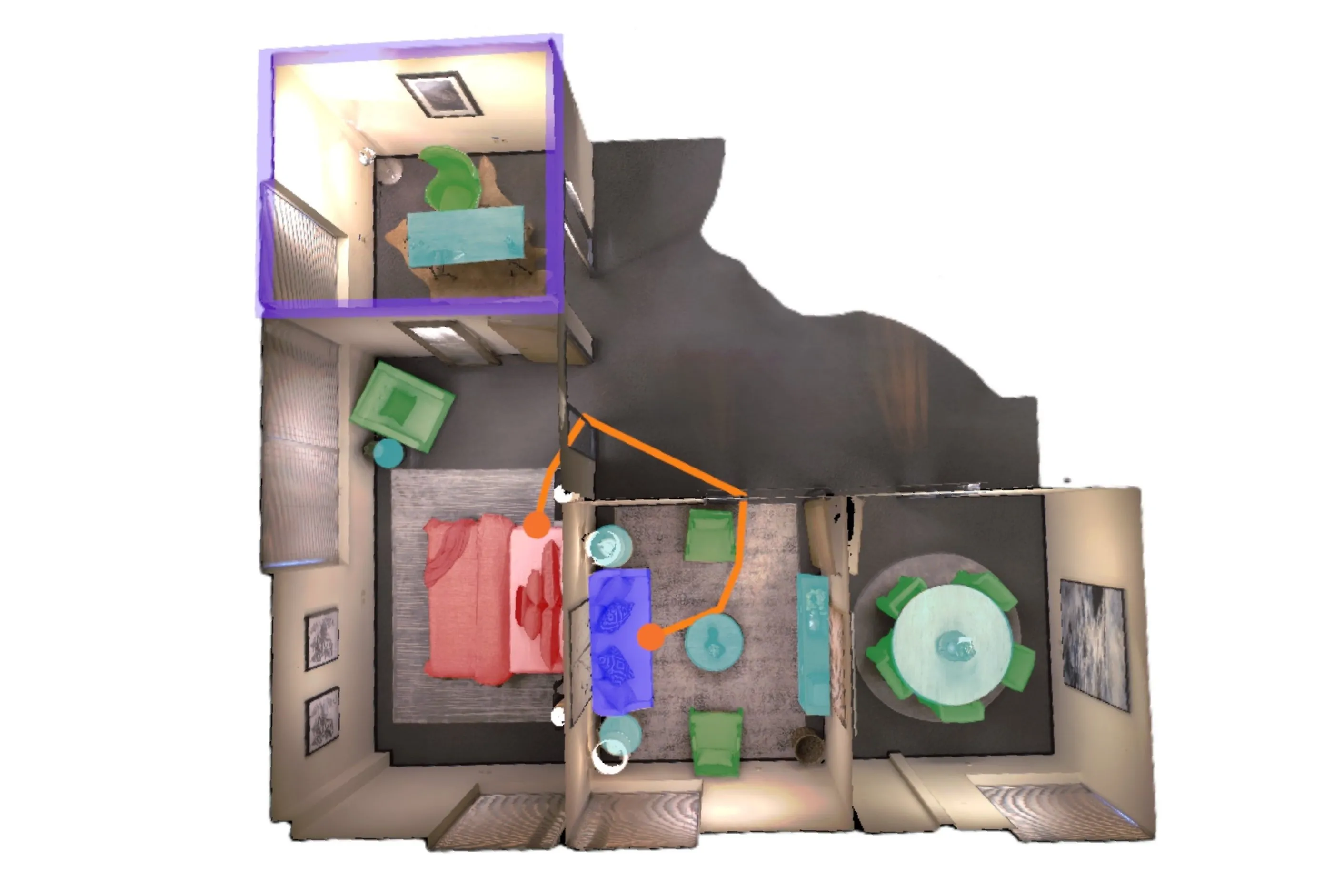
- Successfully delivered two Python-based projects involving semantic scene understanding, monocular depth estimation and object detection, in both IR and RGB space (stakeholder management, implementation, data collection, partner collaboration).
- Submitted two patent applications (decision pending).
1st place in a company-wide hackathon · Agentic systems · 06.2025