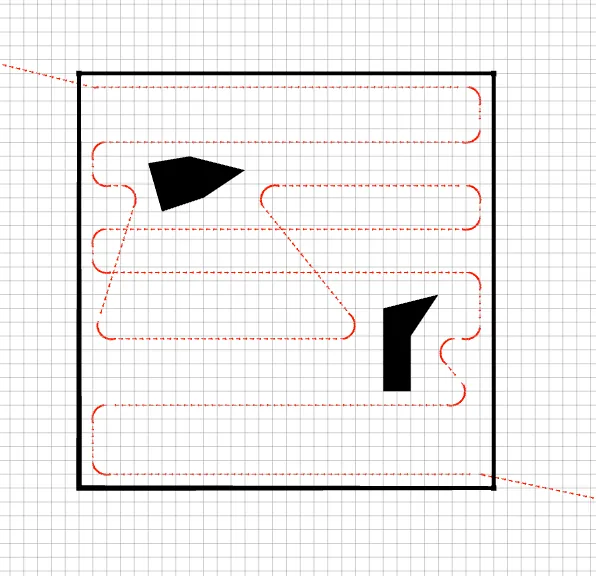
Kinematic Coverage Path Planning
Solution to local constrained optimization problem by Dubins-like path smoothing to a coverage path plan; evaluated with underwater robots.
Private & university projects.
For research projects, please visit the Publications section.



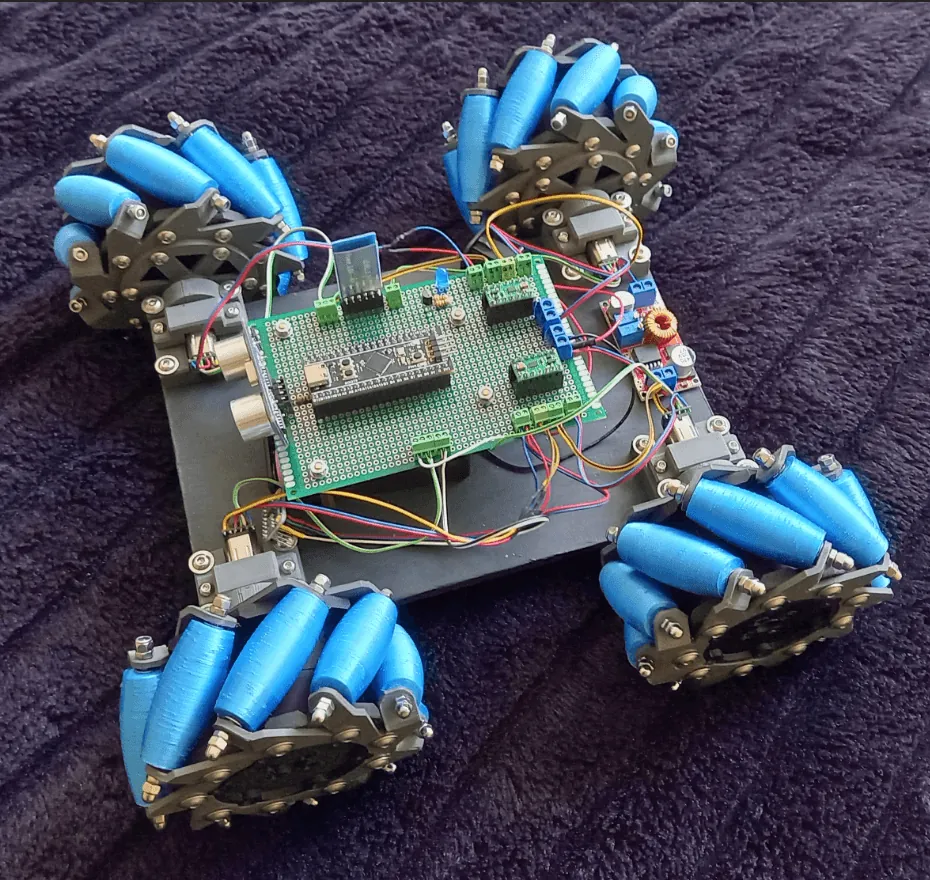


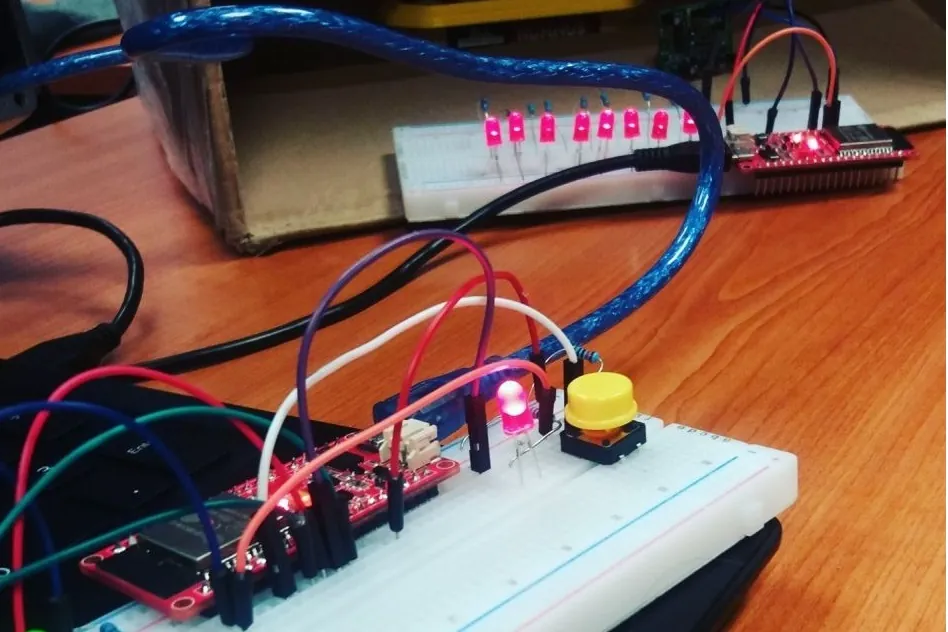
Projects implemented in C/C++ with RPi, SMT32, AVR & ESP32.