Job experience

11.2024-...
, Schaan (LI)
On the position of Computer Vision Research Engineer, I am investigating possible improvements of Hilti's construction solutions with respect to the computer vision and artificial intelligence aspects.

10'23-02'24
, Zurich (CH)
As an R&D Software Developer Intern, I implemented a calibration procedure for the camera-mount system. I was responsible for interfacing with available sensors, designing the system architecture, parallelizing the tests and integrating everything in Python. The internship's goal was also to learn about the clean software development, with a focus on design patterns and test automation tools.
01-06.2022
, Wroclaw (PL)
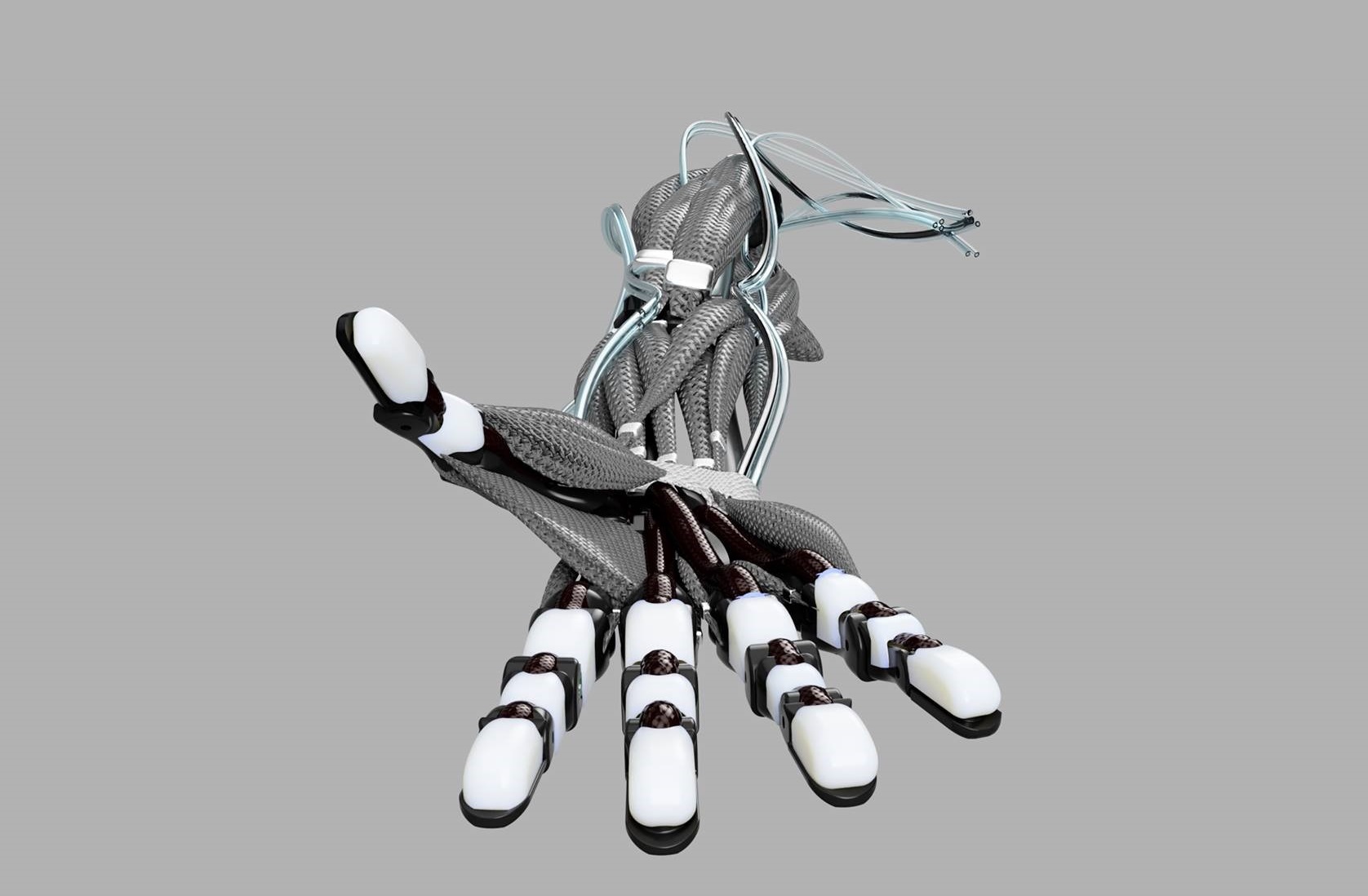
6-month experience of working as a Junior Robotics Researcher in a start-up focused on developing a robotic hand with artificial hydraulic muscles. The future goal is to build the whole humanoid robot. My resposibilities were to implement Python software solutions, take care of the vision and create a simulation of the hand with MuJoCo physics engine. Check out the project's YT and website!

07-09.2020
, Kwidzyn (PL)
As a Test Engineer Intern in the Jabil factory, I took care of the testing machines, their maintenance, improvement and fixture inspection. I developed some testing programs in C#, optimized two ABB robots' operation and prepared different analysis in Minitab. All interns participated in workshops on soldering, AVR programming, TIA Portal and Lean Six Sigma with Kaizen.


{kind=link}