Research projects
Robotic optimization
arXiv 2025
Paper | Thesis | Code
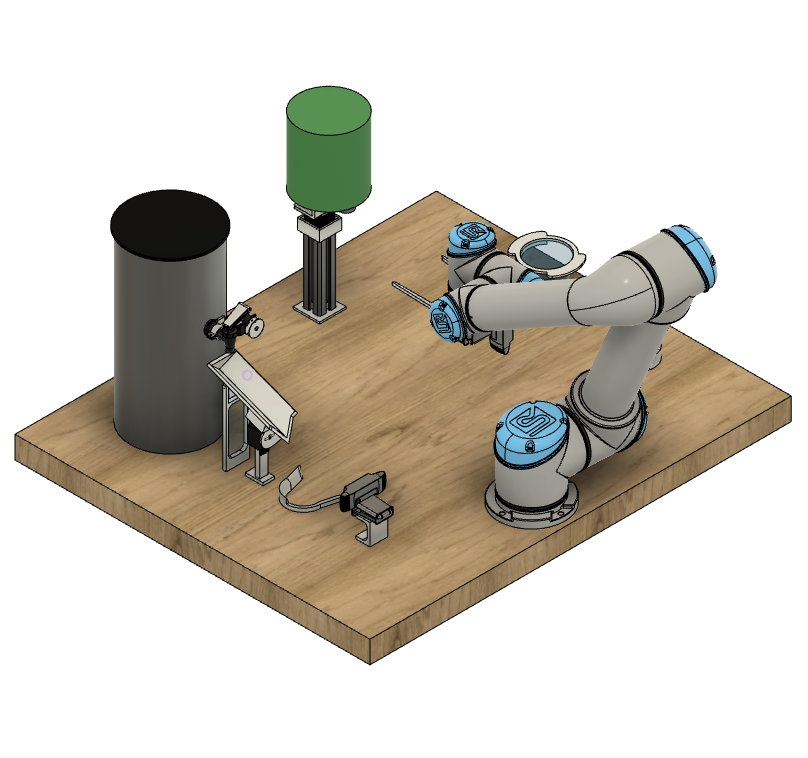
We developed a robotic setup able to prepare cappuccinos, evaluate their quality, and optimize the preparation process. We carried out a series of experiments which proved that Bayesian Optimization managed to identify the system parameters to prepare the coffee with optimal qualities.
Space3D-Bench
ECCV Workshop 2024
Webpage | Thesis
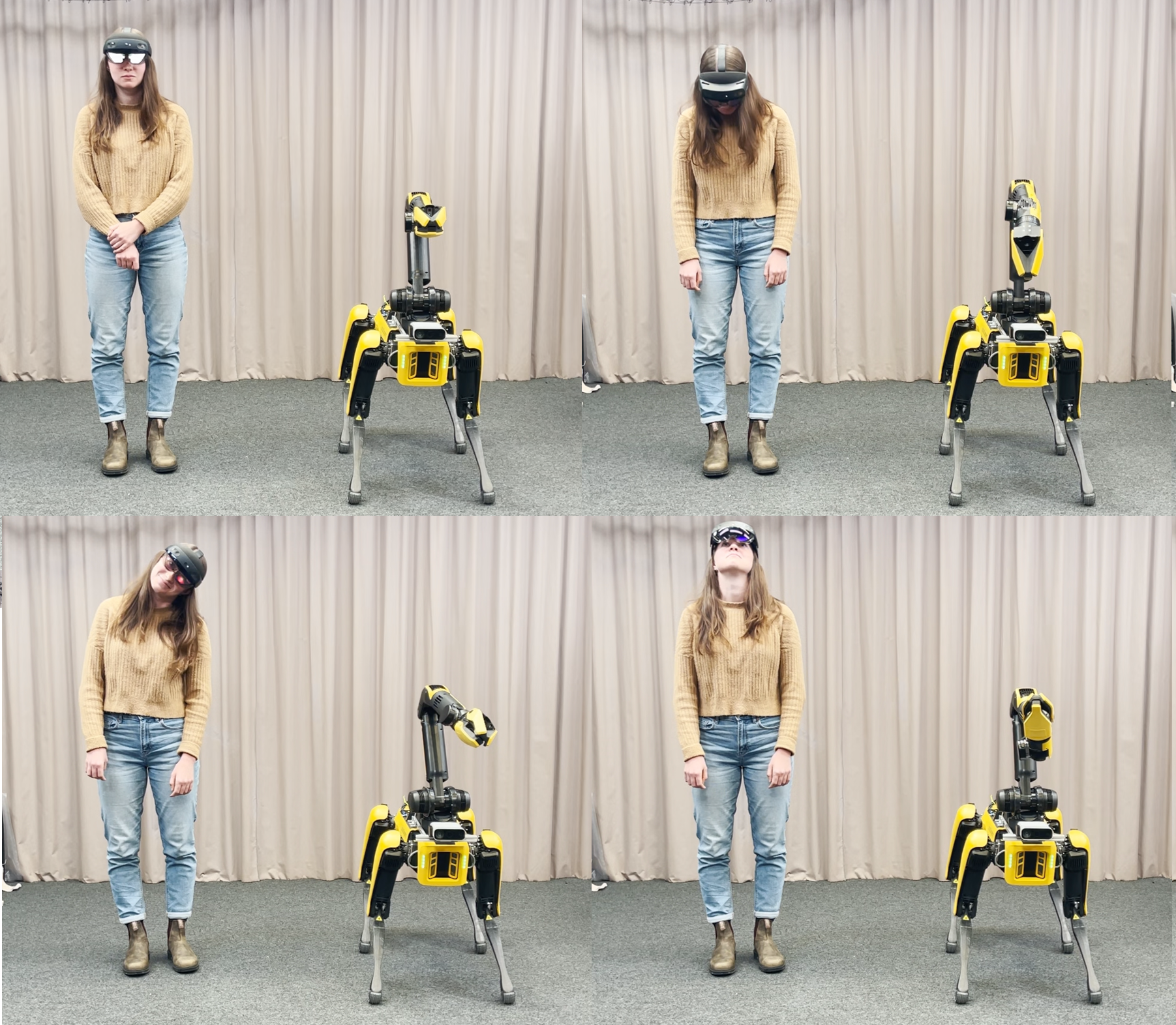
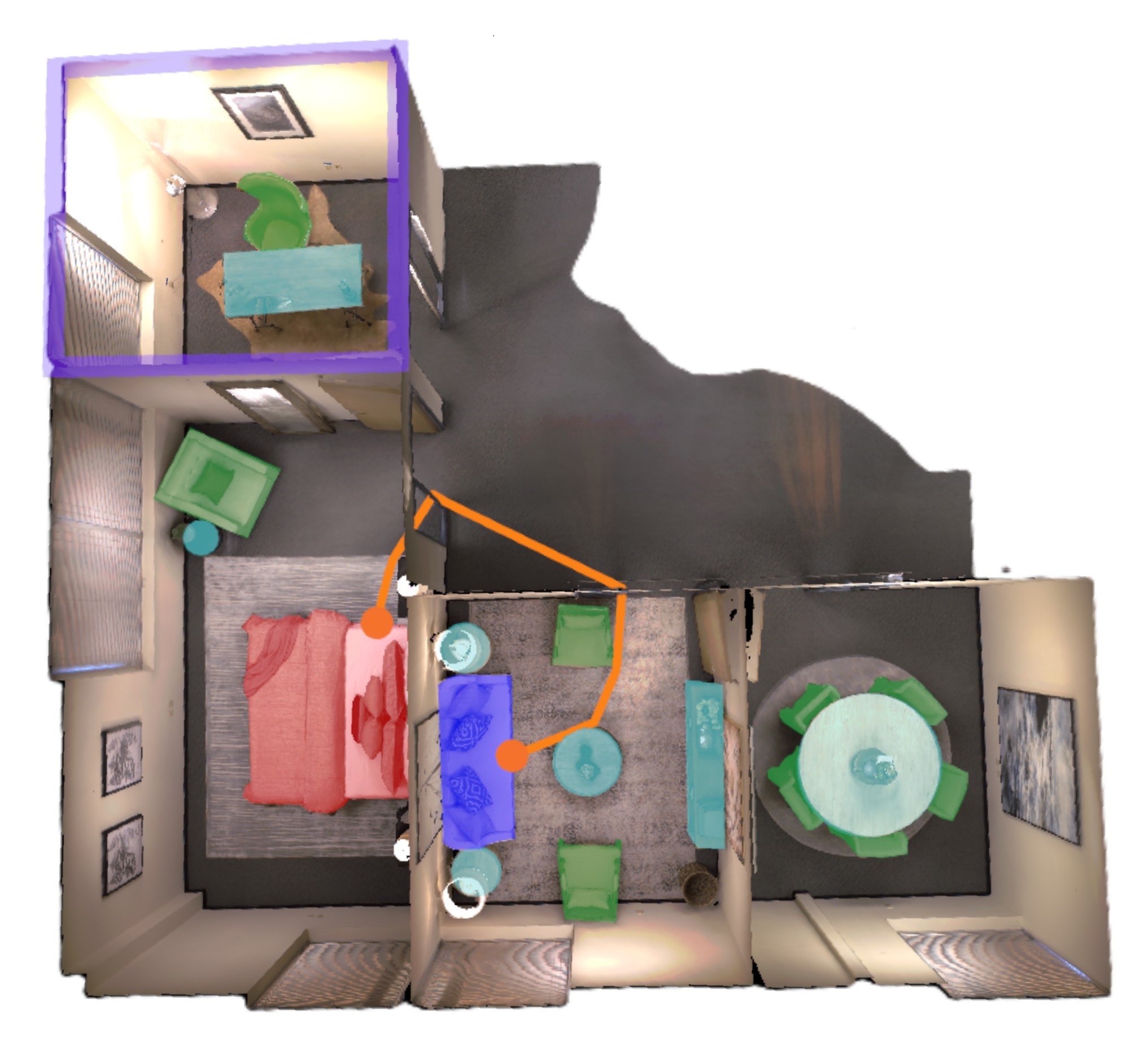
We created a benchmark on 3D Q&A for LLM systems, consiting of 1'000 questions with answers. We developed a RAG-based solution that leveraged various modalities (text, images, SQL DB and navigation meshes) to answer the spatial questions from the dataset.

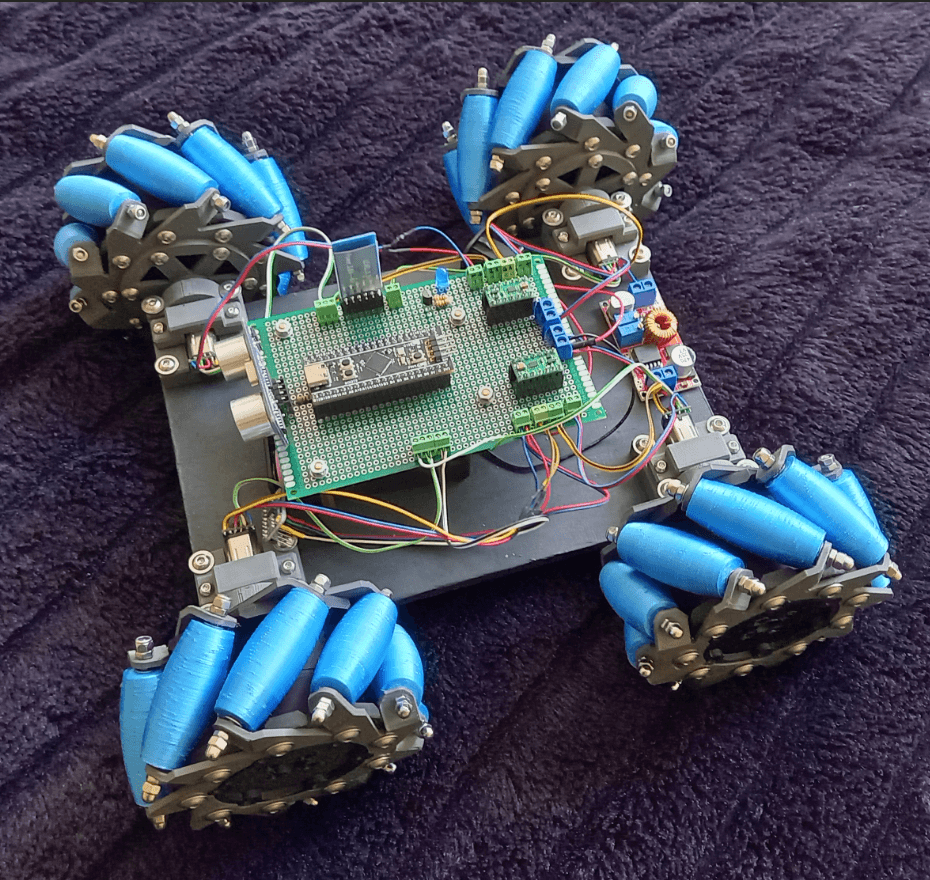
Teleoperation
MIPRO 2021
Paper
We investigated the usage of User Datagram Protocol for two-way communication between an Android mobile device and Robot Operating System. As a case study, we implemented a solution for controlling the Turtlebot3 differential drive mobile robot with the use of ROS.
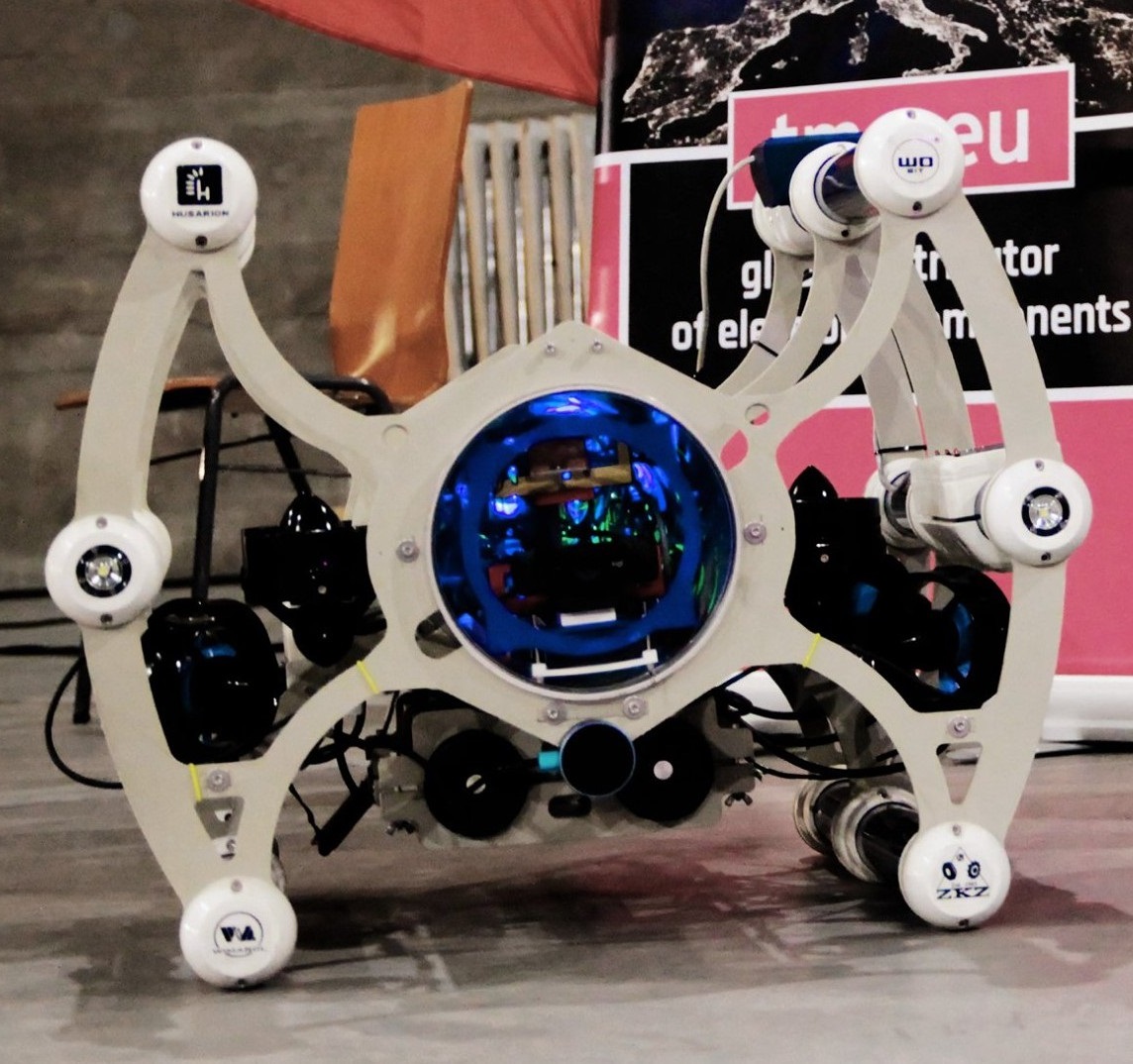
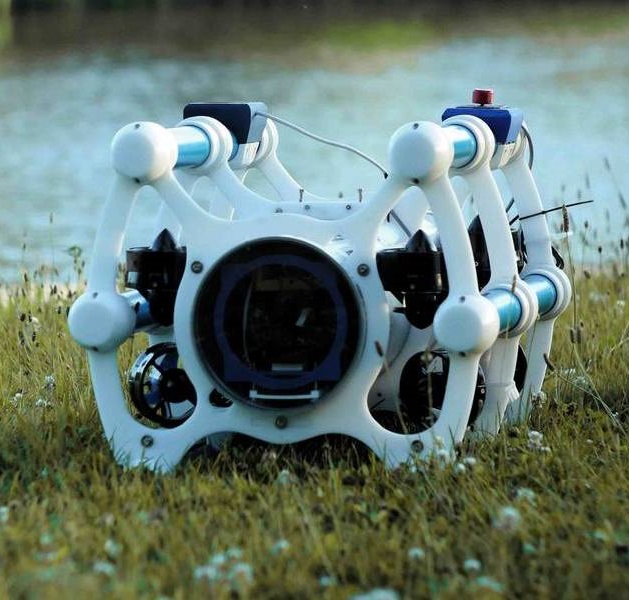
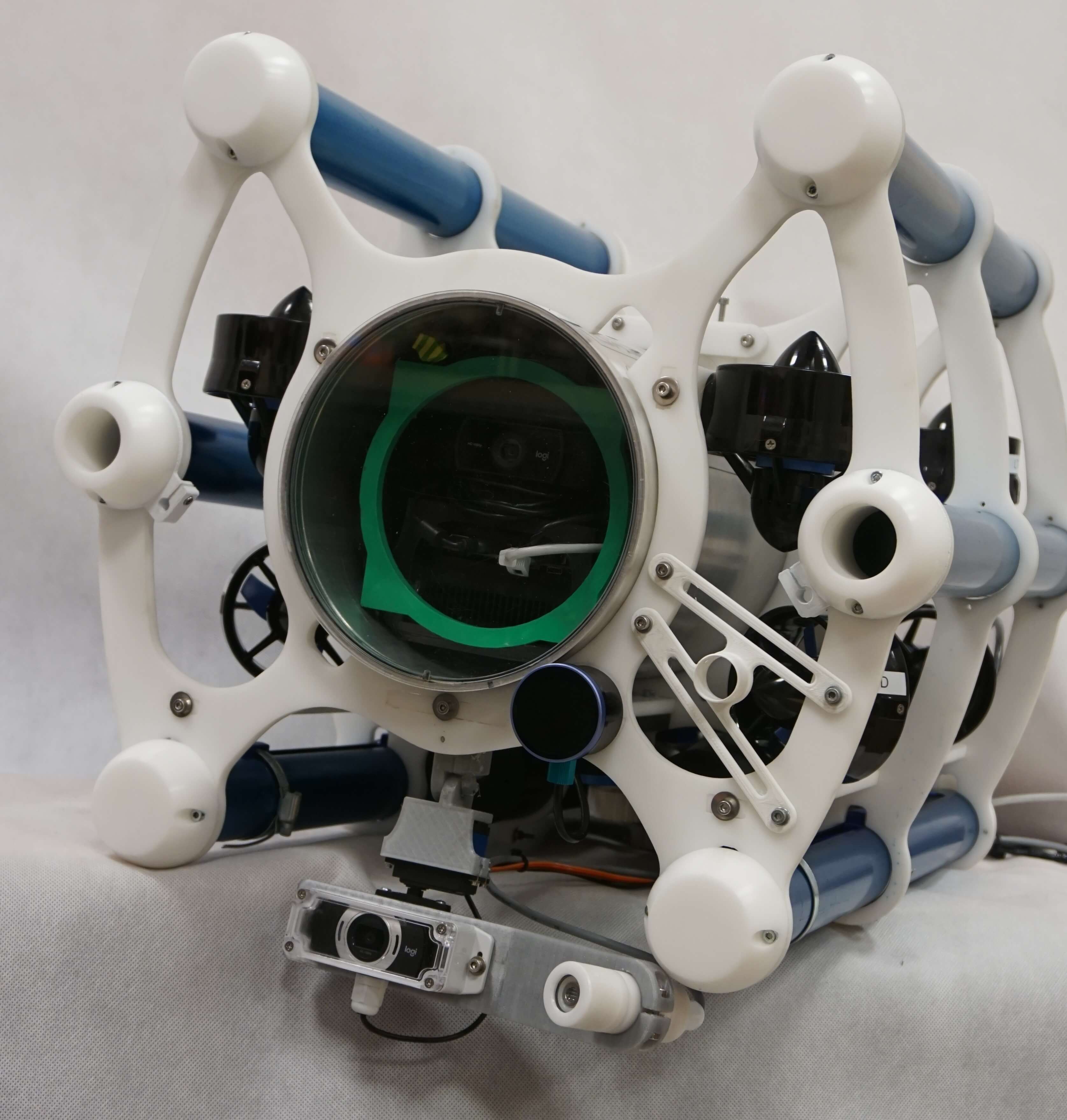
From ROVs to AUVs
MIPRO 2022
Paper
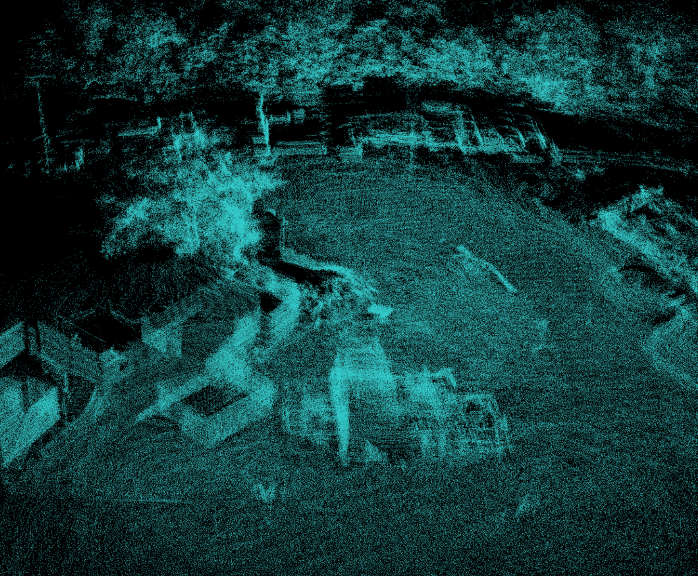
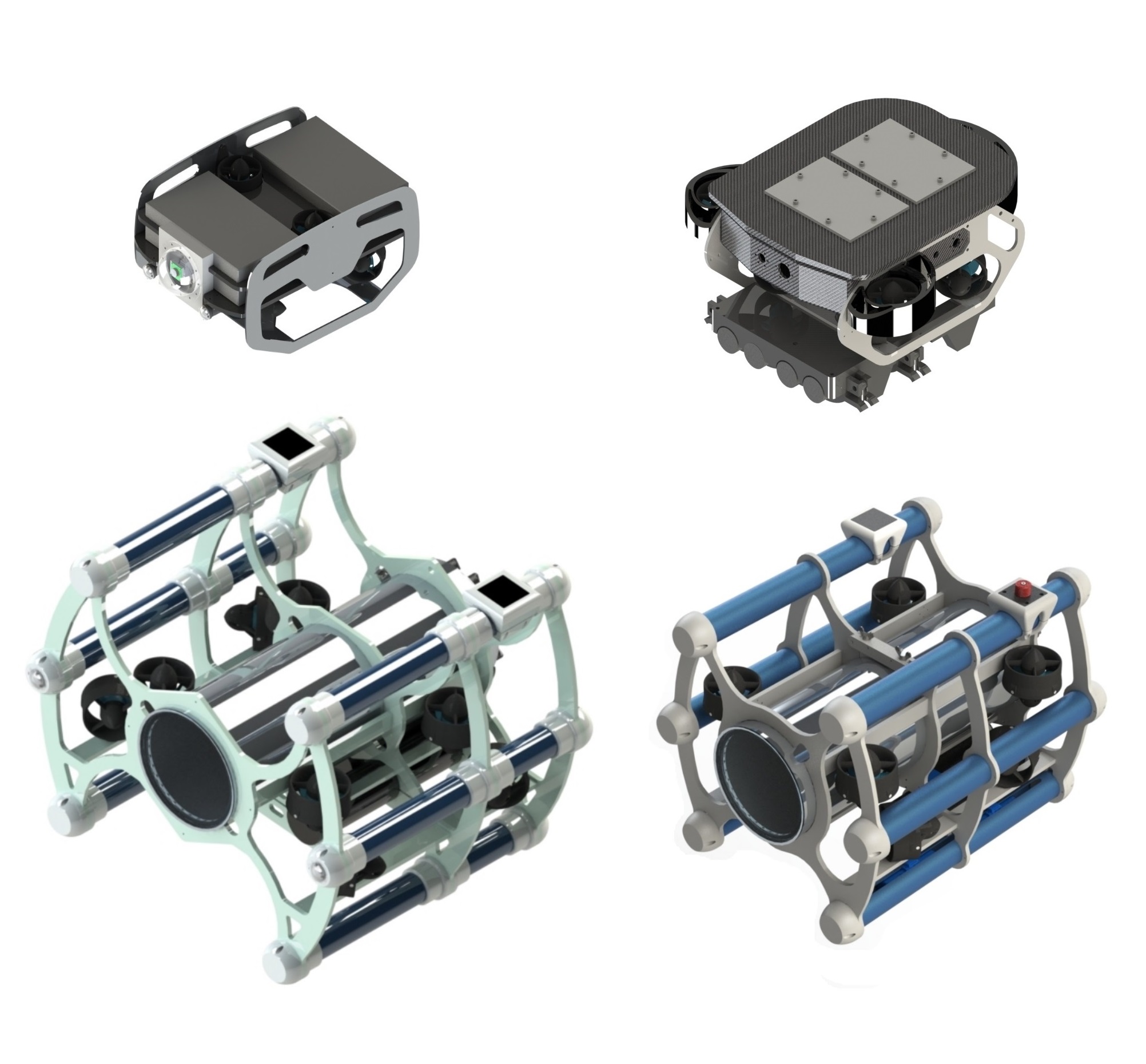
We presented a comparative analysis of the underwater robot design steps using PWr Diving Crew project's robots, where simplified ROVs were improved to AUVs. We then described the altered approach to the problem in the successive vehicle generations.
Laser triangulation
MIPRO 2022
Paper
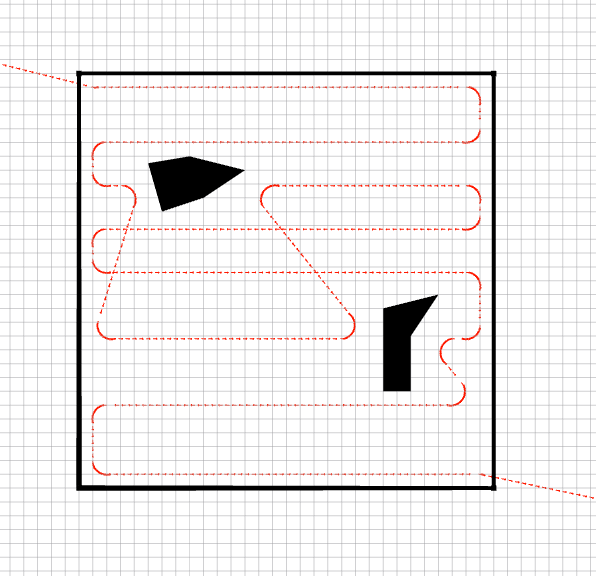
We designed a laser triangulator intended to be mounted on AUVs and ROVs. The operation principles for the device were simplified, allowing for relatively cheap creation, yet holding the required features. This research was completed with tests above and under the water.
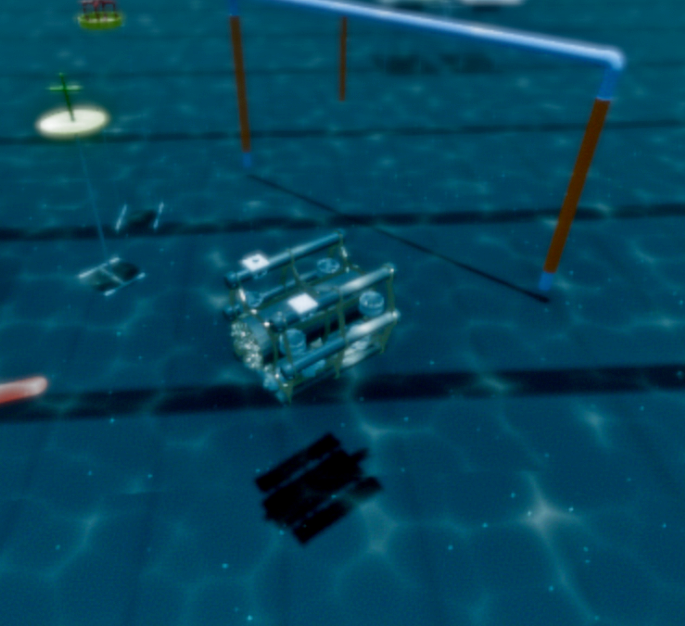
ROV/AUV simulator
IAS 2022
Paper
We developed a Unity3D framework, which i.a. supports communication with ROV/AUV systems (collects observations via simulated sensors and controls simulated actuators), gathers data sets for online training, and randomizes parts of the environment to test the system's robustness.